
For more information and updates about the game, which is a voxel colony simulation / survival, please subscribe to r/CheesyGames.
World Generation
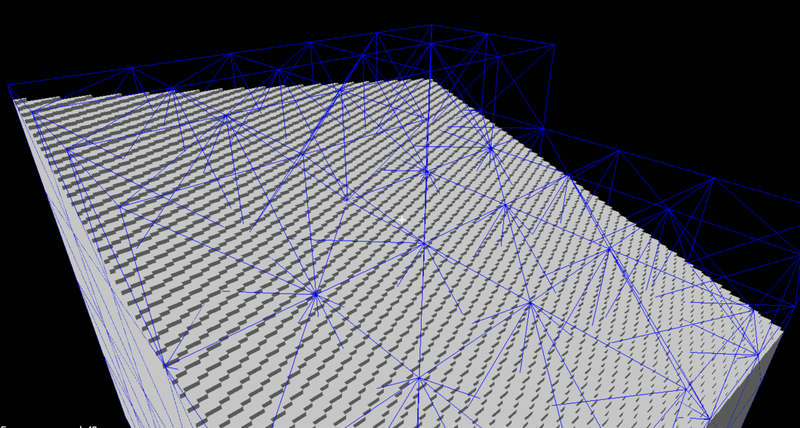
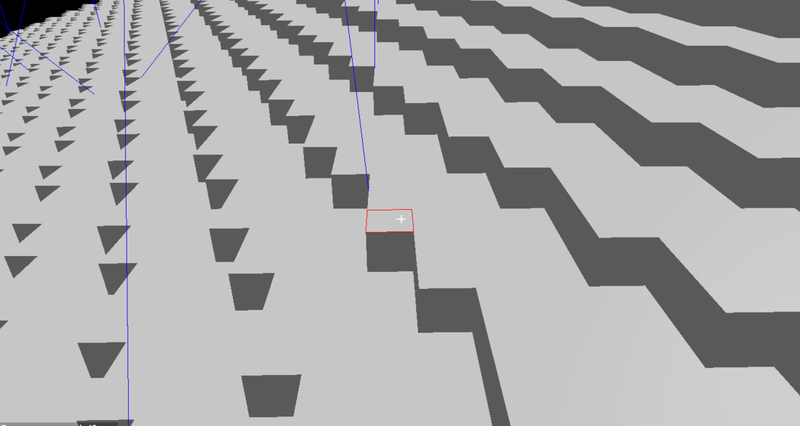
This is a simple world made of chunks of 32³ voxels. The world itself is not static : as you can see on the top of the image, chunks only exist if there is at least one solid voxel in them. In other words, the world is dynamic and can contain as many chunks as the player's computer can handle.
In this particular screenshot, the world is generated with the simple vectorial gradient equation that I invented in high school but which I suppose already existed. Here's the basic equation :
\[\overrightarrow{ voxel \: value } = \frac{ \overrightarrow{ position } \cdot \overrightarrow{ gradient } }{ \overrightarrow{ gradient } \cdot \overrightarrow{ gradient} }\]
Preview of LaTeX equation :

That's the equation I came up with and remembered. The gradient * gradient can be simplified for the magnitude (length) of the gradient power squared.
\[\overrightarrow{ voxel \: value } = \frac{ \overrightarrow{ position } \cdot \overrightarrow{ gradient } }{ \left \| \overrightarrow{ gradient } \right \| ^{2} }\]
Preview of LaTeX equation :

In conclusion, this gives an N dimensional gradient which gives a single decimal number.
Voxel Traversal Algorithm
As for the voxel traversal algorithm, I decided to go with the most popular one, which was made by John Amanatides and Andrew Woo. As much as I like research papers, I also despise them because they lack simplicity, examples and full source code. That's why I had to google implementations of it and later on remembered that I had actually already implemented this algorithm a few years ago.
Summary
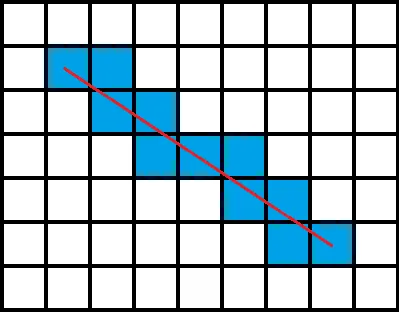
The simplest way to understand the algorithm is to imagine a line in an 3D world made of blocks. Which blocks does the line touch? Then, in which order are they touched based on the line's start and end positions? The goal is to traverse iteratively the blocks that are touched by the line .
More simply, the logic of the algorithm can be summed making a distinction between the ray's direction's components. Those three define the importance of their axes in terms of how many blocks need to be traversed in what direction. Think of this with integers : two people are running to reach a goal; the fastest runs a 5 km/h, while the slowest runs at 1 km/h. For each time step, i.e. an hour, how many kilometers have each runner traveled? The ratio is 5 : 1, so, to merge the analogy, a ray would traverse each step 5 blocks on the X axis and 1 block on the Y axis. Of course, it's more complicated than that, as there are more parameters to it, especially because of exceptions such as what to do when each component is equal with one another?
Implementation
The first thing to know about my implementation is that each voxel index is centered within the voxel itself. In other words, the voxel at the position (0, 0, 0) starts at (-0.5, -0.5, -0.5) inclusively and ends at (0.5, 0.5, 0.5) exclusively. This is for a cube extent of 1, naturally. The original research paper doesn't work that way as it starts at the lowest corner, i.e. the voxel spans from (0, 0, 0) to (1, 1, 1). Without any further delay, here is the class for the VoxelRay :
package com.cheesygames.colonysimulation.math.bounding.ray;
import com.cheesygames.colonysimulation.math.MathExt;
import com.cheesygames.colonysimulation.math.bounding.VoxelWorldUtils;
import com.cheesygames.colonysimulation.math.vector.Vector3i;
import com.cheesygames.colonysimulation.world.World;
import com.jme3.math.Vector3f;
import com.jme3.scene.plugins.blender.math.Vector3d;
/**
* Ray for ray casting inside a voxel world. Each voxel is considered as a cube within this ray. A ray consists of a starting position, a direction and a length. The voxel distance
* is computed once the method {@link #rayCastLocal(double, VoxelRayOnTraversing, Vector3i)} or {@link #rayCast(double, VoxelRayOnTraversing)} is called.
*/
public class VoxelRay {
private Vector3d m_start;
private Vector3d m_offsettedStart;
private Vector3d m_direction;
private double m_length;
private int m_voxelDistance;
private boolean m_wasStopped;
/**
* Constructs an invalid {@link VoxelRay} as its direction and length are null. The setters must be called after constructing a {@link VoxelRay} with this constructors.
*/
public VoxelRay() {
this.m_start = new Vector3d();
this.m_offsettedStart = new Vector3d();
this.m_direction = new Vector3d();
this.m_length = 0;
}
/**
* Constructs a {@link VoxelRay} from two points : start and end.
*
* @param start The absolute starting position of the ray.
* @param end The absolute ending position of the ray.
*/
public VoxelRay(Vector3d start, Vector3d end) {
this.m_start = new Vector3d(start);
this.m_offsettedStart = new Vector3d();
this.m_direction = end.subtract(start);
this.m_length = m_direction.length();
this.m_direction.normalizeLocal();
}
/**
* Constructs a {@link VoxelRay} from two points : start and end.
*
* @param start The absolute starting position of the ray.
* @param end The absolute ending position of the ray.
*/
public VoxelRay(Vector3f start, Vector3f end) {
this.m_start = new Vector3d(start);
this.m_offsettedStart = new Vector3d();
this.m_direction = new Vector3d(end).subtractLocal(m_start);
this.m_length = m_direction.length();
this.m_direction.normalizeLocal();
}
/**
* Constructs a {@link VoxelRay} from a start, a direction and a length.
*
* @param start The absolute starting position of the ray.
* @param direction The direction of the ray. Must be normalized.
* @param length The length of the ray.
*/
public VoxelRay(Vector3d start, Vector3d direction, double length) {
this.m_start = new Vector3d(start);
this.m_offsettedStart = new Vector3d();
this.m_direction = new Vector3d(direction);
this.m_length = length;
}
/**
* Constructs a {@link VoxelRay} from a start, a direction and a length.
*
* @param start The absolute starting position of the ray.
* @param direction The direction of the ray. Must be normalized.
* @param length The length of the ray.
*/
public VoxelRay(Vector3f start, Vector3f direction, float length) {
this.m_start = new Vector3d(start);
this.m_offsettedStart = new Vector3d();
this.m_direction = new Vector3d(direction);
this.m_length = length;
}
/**
* Casts the ray from its starting position towards its direction whilst keeping in mind its length. A lambda parameter is supplied and called each time a voxel is traversed.
* This allows the lambda to stop anytime the algorithm to continue its loop.
*
* @param onTraversingVoxel The operation to execute when traversing a voxel. This method called the same number of times as the value of {@link #getVoxelDistance()}. The
* supplied {@link Vector3i} parameter is not a new instance but a local instance, so it is a reference. The return value {@link Boolean} defines if
* the algorithm should stop.
*
* @see <a href="http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.42.3443&rep=rep1&type=pdf">A Fast Voxel Traversal Algorithm</a>
*/
public void rayCast(VoxelRayOnTraversing onTraversingVoxel) {
rayCastLocal(World.VOXEL_HALF_EXTENT, onTraversingVoxel, new Vector3i());
}
/**
* Casts the ray from its starting position towards its direction whilst keeping in mind its length. A lambda parameter is supplied and called each time a voxel is traversed.
* This allows the lambda to stop anytime the algorithm to continue its loop.
*
* @param voxelHalfExtent The half extent (radius) of a voxel.
* @param onTraversingVoxel The operation to execute when traversing a voxel. This method called the same number of times as the value of {@link #getVoxelDistance()}. The
* supplied {@link Vector3i} parameter is not a new instance but a local instance, so it is a reference. The return value {@link Boolean} defines if
* the algorithm should stop.
*
* @see <a href="http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.42.3443&rep=rep1&type=pdf">A Fast Voxel Traversal Algorithm</a>
*/
public void rayCast(double voxelHalfExtent, VoxelRayOnTraversing onTraversingVoxel) {
rayCastLocal(voxelHalfExtent, onTraversingVoxel, new Vector3i());
}
/**
* Casts the ray from its starting position towards its direction whilst keeping in mind its length. A lambda parameter is supplied and called each time a voxel is traversed.
* This allows the lambda to stop anytime the algorithm to continue its loop.
* <p>
* This method is local because the parameter voxelIndex is locally changed to avoid creating a new instance of {@link Vector3i}.
*
* @param onTraversingVoxel The operation to execute when traversing a voxel. This method called the same number of times as the value of {@link #getVoxelDistance()}. The
* supplied {@link Vector3i} parameter is not a new instance but a local instance, so it is a reference. The return value {@link Boolean} defines if
* the algorithm should stop.
* @param voxelIndex The voxel index to locally modify in order to traverse voxels. This parameter exists simply to avoid creating a new {@link Vector3i} instance.
*
* @see <a href="http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.42.3443&rep=rep1&type=pdf">A Fast Voxel Traversal Algorithm</a>
*/
public void rayCastLocal(VoxelRayOnTraversing onTraversingVoxel, Vector3i voxelIndex) {
rayCastLocal(World.VOXEL_HALF_EXTENT, onTraversingVoxel, voxelIndex);
}
/**
* Casts the ray from its starting position towards its direction whilst keeping in mind its length. A lambda parameter is supplied and called each time a voxel is traversed.
* This allows the lambda to stop anytime the algorithm to continue its loop.
* <p>
* This method is local because the parameter voxelIndex is locally changed to avoid creating a new instance of {@link Vector3i}.
*
* @param voxelHalfExtent The half extent (radius) of a voxel.
* @param onTraversingVoxel The operation to execute when traversing a voxel. This method called the same number of times as the value of {@link #getVoxelDistance()}. The
* supplied {@link Vector3i} parameter is not a new instance but a local instance, so it is a reference. The return value {@link Boolean} defines if
* the algorithm should stop.
* @param voxelIndex The voxel index to locally modify in order to traverse voxels. This parameter exists simply to avoid creating a new {@link Vector3i} instance.
*
* @see <a href="http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.42.3443&rep=rep1&type=pdf">A Fast Voxel Traversal Algorithm</a>
*/
public void rayCastLocal(double voxelHalfExtent, VoxelRayOnTraversing onTraversingVoxel, Vector3i voxelIndex) {
assert !Double.isNaN(voxelHalfExtent);
assert !Double.isNaN(m_start.x);
assert !Double.isNaN(m_start.y);
assert !Double.isNaN(m_start.z);
assert !Double.isNaN(m_direction.x);
assert !Double.isNaN(m_direction.y);
assert !Double.isNaN(m_direction.z);
assert !Double.isNaN(m_length);
m_wasStopped = false;
final double voxelExtent = voxelHalfExtent * 2;
// This id of the first/current voxel hit by the ray.
m_offsettedStart.set(m_start).addLocal(voxelHalfExtent, voxelHalfExtent, voxelHalfExtent);
VoxelWorldUtils.getVoxelIndexNoOffsetLocal(voxelExtent, m_offsettedStart, voxelIndex);
computeVoxelDistance(voxelExtent, voxelIndex);
assert !Double.isNaN(m_voxelDistance);
// In which direction the voxel ids are incremented.
int stepX = (int) MathExt.getSignZeroPositive(m_direction.x);
int stepY = (int) MathExt.getSignZeroPositive(m_direction.y);
int stepZ = (int) MathExt.getSignZeroPositive(m_direction.z);
// Distance along the ray to the next voxel border from the current position (tMaxX, tMaxY, tMaxZ).
double nextVoxelBoundaryX = (voxelIndex.x + (MathExt.getNegativeSign(stepX) + 1)) * voxelExtent;
double nextVoxelBoundaryY = (voxelIndex.y + (MathExt.getNegativeSign(stepY) + 1)) * voxelExtent;
double nextVoxelBoundaryZ = (voxelIndex.z + (MathExt.getNegativeSign(stepZ) + 1)) * voxelExtent;
// tMaxX, tMaxY, tMaxZ -- distance until next intersection with voxel-border
// the value of t at which the ray crosses the first vertical voxel boundary
double tMaxX = (m_direction.x != 0) ? (nextVoxelBoundaryX - m_offsettedStart.x) / m_direction.x : Double.MAX_VALUE;
double tMaxY = (m_direction.y != 0) ? (nextVoxelBoundaryY - m_offsettedStart.y) / m_direction.y : Double.MAX_VALUE;
double tMaxZ = (m_direction.z != 0) ? (nextVoxelBoundaryZ - m_offsettedStart.z) / m_direction.z : Double.MAX_VALUE;
// tDeltaX, tDeltaY, tDeltaZ --
// how far along the ray we must move for the horizontal component to equal the width of a voxel
// the direction in which we traverse the grid
// can only be FLT_MAX if we never go in that direction
double tDeltaX = (m_direction.x != 0) ? stepX * voxelExtent / m_direction.x : Double.MAX_VALUE;
double tDeltaY = (m_direction.y != 0) ? stepY * voxelExtent / m_direction.y : Double.MAX_VALUE;
double tDeltaZ = (m_direction.z != 0) ? stepZ * voxelExtent / m_direction.z : Double.MAX_VALUE;
onTraversingVoxel.startRayCast();
if (onTraversingVoxel.apply(voxelIndex)) {
m_wasStopped = true;
return;
}
int traversedVoxelCount = 0;
while (++traversedVoxelCount < m_voxelDistance) {
if (tMaxX < tMaxY && tMaxX < tMaxZ) {
voxelIndex.x += stepX;
tMaxX += tDeltaX;
}
else if (tMaxY < tMaxZ) {
voxelIndex.y += stepY;
tMaxY += tDeltaY;
}
else {
voxelIndex.z += stepZ;
tMaxZ += tDeltaZ;
}
if (onTraversingVoxel.apply(voxelIndex)) {
m_wasStopped = true;
break;
}
}
}
/**
* Computes the voxel distance, a.k.a. the number of voxel to traverse, for the ray cast.
*
* @param voxelExtent The extent of a voxel, which is the equivalent for a cube of a sphere's radius.
* @param startIndex The starting position's index.
*/
private void computeVoxelDistance(double voxelExtent, Vector3i startIndex) {
m_voxelDistance = 1 + MathExt.abs(VoxelWorldUtils.getVoxelIndexNoOffset(voxelExtent, m_offsettedStart.x + m_direction.x * m_length) - startIndex.x) + MathExt.abs(
VoxelWorldUtils.getVoxelIndexNoOffset(voxelExtent, m_offsettedStart.y + m_direction.y * m_length) - startIndex.y) + MathExt.abs(
VoxelWorldUtils.getVoxelIndexNoOffset(voxelExtent, m_offsettedStart.z + m_direction.z * m_length) - startIndex.z);
}
public Vector3d getStart() {
return m_start;
}
public Vector3d getDirection() {
return m_direction;
}
public double getLength() {
return m_length;
}
public int getVoxelDistance() {
return m_voxelDistance;
}
public void setStart(Vector3d start) {
m_start.set(start);
}
public void setStart(Vector3f start) {
m_start.set(start);
}
/**
* Sets the direction.
*
* @param direction The direction to set to the ray. Must be normalized.
*/
public void setDirection(Vector3d direction) {
m_direction.set(direction);
}
/**
* Sets the direction.
*
* @param direction The direction to set to the ray. Must be normalized.
*/
public void setDirection(Vector3f direction) {
m_direction.set(direction);
}
/**
* Sets the length of the ray.
*
* @param length The new length of the ray. Must be positive.
*/
public void setLength(double length) {
m_length = length;
}
/**
* Sets the end position of the ray, which is not a real variable but a way to set the direction and the length at the same time. The start position does matter for this
* method.
*
* @param end Where the ray ends.
*/
public void setEnd(Vector3d end) {
m_direction.set(end).subtractLocal(m_start);
m_length = m_direction.length();
m_direction.normalizeLocal();
}
/**
* Gets if the voxel ray cast was stopped by the "onTraversingVoxel" method call.
*
* @return True if the voxel ray cast was stopped by the "onTraversingVoxel" method call, false otherwise.
*/
public boolean wasStopped() {
return m_wasStopped;
}
}Here are the external static methods :
/**
* Gets the voxel index of the specified position. This method suppose that the parameter position is already offsetted with + voxel half extent. This method local because the supplied voxel index will be locally modified and returned.
*
* @param voxelExtent The extent of a voxel, which is the equivalent to a cube of a sphere's diameter.
* @param position The position to get the voxel index from. Must already be offsetted with + voxel half extent * @param voxelIndex Where to store the voxel index.
* @return The voxel index parameter that is set to the supplied position's voxel index.
*/
public static Vector3i getVoxelIndexNoOffsetLocal(double voxelExtent, Vector3d position, Vector3i voxelIndex) {
return voxelIndex.set(getVoxelIndexNoOffset(voxelExtent, position.x), getVoxelIndexNoOffset(voxelExtent, position.y), getVoxelIndexNoOffset(voxelExtent, position.z));
}
/**
* Gets the sign of the supplied number. The method being "zero position" means that the sign of zero is 1.
*
* @param number The number to get the sign from.
* @return The number's sign.
*/
public static long getSignZeroPositive(double number) {
assert !Double.isNaN(number);
return getNegativeSign(number) | 1;
}
/**
* Gets the negative sign of the supplied number. So, in other words, if the number is negative, -1 is returned but if the number is positive or zero, then zero is returned.
* It does not check if the parameter is NaN.
*
* @param number The number to get its negative sign.
* @return -1 if the number is negative, 0 otherwise.
*/
public static long getNegativeSign(double number) {
assert !Double.isNaN(number);
return Double.doubleToRawLongBits(number) >> BIT_COUNT_EXCLUDING_SIGN_64;
}
The important parts to adjust the algorithm to fit my voxel boundaries are the following :
m_offsettedStart.set(m_start).addLocal(voxelHalfExtent, voxelHalfExtent, voxelHalfExtent);It is mandatory to add the half extent to the starting position.
double nextVoxelBoundaryX = (voxelIndex.x + (MathExt.getNegativeSign(stepX) + 1)) * voxelExtent; double nextVoxelBoundaryY = (voxelIndex.y + (MathExt.getNegativeSign(stepY) + 1)) * voxelExtent; double nextVoxelBoundaryZ = (voxelIndex.z + (MathExt.getNegativeSign(stepZ) + 1)) * voxelExtent;What the MathExt method call does could be programmed as : (stepX >= 0 ? 1 : 0).
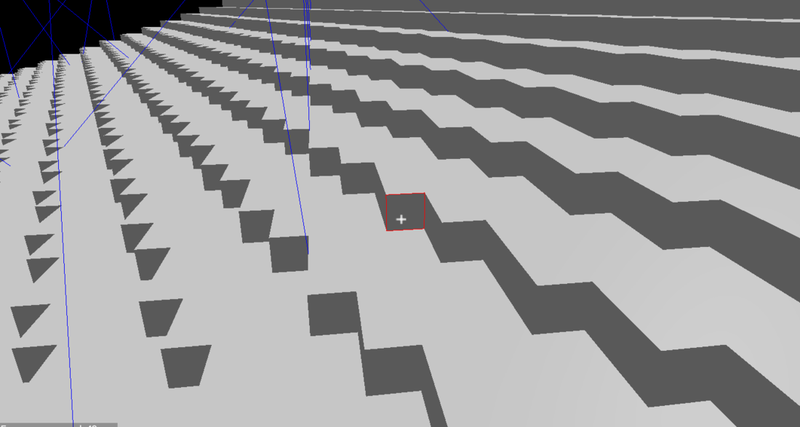
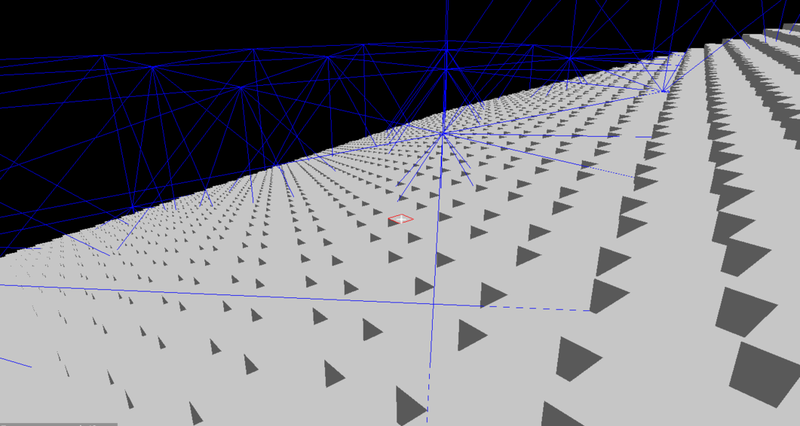
I don't know how to express how it is delightful when everything starts to fit and work properly :')
Here are some screenshots :





Don't the gradients cancel in your formula? You should end up with just position/gradient?