_WeirdCat_ said:
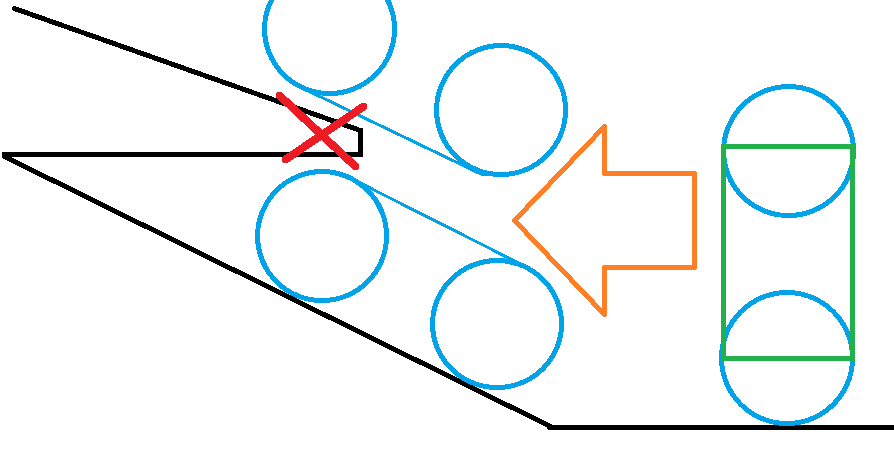
Just to clarify look at this drawing you made red line is pdst, green line is sphere_radius (scaled radius)
Not sure what you mean, but i guess you want to find the exact time where the sphere hits the vertex?
Then, like NikiTo said above, you can make the vertex a sphere (Minkovski sum) and the sphere a point, and trace a ray along velocity against the vertex sphere.
To extend this approach to a polyhedron, edges become cylinders, and faces can be offset along their normal by sphere radius.
Here is some code i used for ray-sphere intersection (rO,dD = ray origin and direction; sO = sphere origin):
inline bool IntersectRaySphere (float &t0, float &t1,
const vec &rO, const vec &rD, const vec &sO, const float sqRad)
{
vec l = sO - rO;
float a = l.Dot(rD);
//if (a < 0) return false;
float d2 = l.Dot(l) - a * a;
if (d2 > sqRad) return false;
float b = sqrt(sqRad - d2);
t0 = a - b;
t1 = a + b;
return true;
}But notice that this only predicts collisions and helps to prevent penetration, but it does not resolve penetration that already exists (or drifts in with time).
I assume such Minkovski methods are mostly used to implement CCD, while resting contact is handled with resolving intersections. But not sure.