– SOLUTION IS IN BOTTOM OF COMMENTS –
I am in the process of writing an animation system with my own Collada parser and am running into an issue that I can't wrap my head around.
I have collected my mesh/skin information (vertices, normals, jointIds, weights, etc), my skeleton information (joints, their local transforms, inverse bind position, hierarchy structure), and my animation (keyframe transform position for each joint, timestamp).
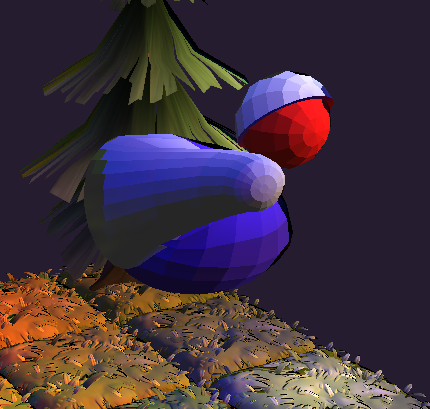
My issue is that with everything calculated and then implemented in the shader (the summation of weights multiplied by the joint transform and vertex position) - I get the following:

When I remove the weight multiplication, the mesh remains fully intact - however the skin doesn't actually follow the animation. I am at a lost as I feel as though the math is correct, but very obviously I am going wrong somewhere. Would someone be able to shine light on the aspect I have misinterpreted?
Here is my current understanding and implementation:
- After collecting all of the joint's localTransforms and hierarchy, I calculate their inverse bind transfromation matrix. To do this I multiple each joints localTransform with their parentLocalTransform to get a bindTransform. Inverting that bindTransform results in their inverseBindTransform. Below is my code for that:
// Recursively collect each Joints InverseBindTransform -
// root joint's local position is an identity matrix.
// Function is only called once after data collection.
void Joint::CalcInverseBindTransform(glm::mat4 parentLocalPosition)
{
glm::mat4 bindTransform = parentLocalPosition * m_LocalTransform;
m_InverseBindPoseMatrix = glm::inverse(bindTransform);
for (Joint child : Children) {
child.CalcInverseBindTransform(bindTransform);
}
}- Within my animator during an animation, for each joint I take the two JointTransforms for the two frame's my currentTime is in between and I calculate the interpolated JointTransform. (JointTransform simply has a vec3 for position and quaternion for rotation). I do this for every joint and then apply those interpolated values to each Joint by again recursively muliplying the new frameLocalTransform by their parentLocalTransform. I take that bindTransform and multiply it by the invBindTransform and then transpose the matrix. Below is the code for that:
std::unordered_map<int, glm::mat4> Animator::InterpolatePoses(float time) {
std::unordered_map<int, glm::mat4> poses;
if (IsPlaying()) {
for (std::pair<int, JointTransform> keyframe : m_PreviousFrame.GetJointKeyFrames()) {
JointTransform previousFrame = m_PreviousFrame.GetJointKeyFrames()[keyframe.first];
JointTransform nextFrame = m_NextFrame.GetJointKeyFrames()[keyframe.first];
JointTransform interpolated = JointTransform::Interpolate(previousFrame, nextFrame, time);
poses[keyframe.first] = interpolated.getLocalTransform();
}
}
return poses;
}
void Animator::ApplyPosesToJoints(std::unordered_map<int, glm::mat4> newPose, Joint* j, glm::mat4 parentTransform)
{
if (IsPlaying()) {
glm::mat4 currentPose = newPose[j->GetJointId()];
glm::mat4 modelSpaceJoint = parentTransform * currentPose;
for (Joint child : j->GetChildren()) {
ApplyPosesToJoints(newPose, &amp;amp;amp;amp;amp;amp;child, modelSpaceJoint);
}
modelSpaceJoint = glm::transpose(j->GetInvBindPosition() * modelSpaceJoint);
j->SetAnimationTransform(modelSpaceJoint);
}
}- I then collect all the newly AnimatedTransforms for each joint and send them to the shader:
void AnimationModel::Render(bool& pass)
{
[...]
std::vector<glm::mat4> transforms = GetJointTransforms();
for (int i = 0; i < transforms.size(); ++i) {
m_Shader->SetMat4f(transforms[i], ("JointTransforms[" + std::to_string(i) + "]").c_str());
}
[...]
}
void AnimationModel::AddJointsToArray(Joint current, std::vector<glm::mat4>&amp;amp;amp;amp;amp;amp; matrix)
{
glm::mat4 finalMatrix = current.GetAnimatedTransform();
matrix.push_back(finalMatrix);
for (Joint child : current.GetChildren()) {
AddJointsToArray(child, matrix);
}
}- In the shader, I simply follow the summation formula that can be found all over the web when researchiing this topic:
for (int i = 0; i < total_weight_amnt; ++i) {
mat4 jointTransform = JointTransforms[jointIds[i]];
vec4 newVertexPos = jointTransform * vec4(pos, 1.0);
total_pos += newVertexPos * weights[i];
[...]- For calculating the weights - I loop through all preadded weights in the vector, and if I find a weight that is less than the weight I'm looking to add - I replace that weight in that position. Otherwise, I append the weight onto the end of the vector. If there are less weights in my vector than my specified max_weights (which is 4) - I fill in the remaining weights/jointIds with 0.
[...]
for (int j = 0; j < weights.size(); ++j) {
if (weight > weights[j]) {
jntsAffected[j] = jointIndex;
weights[j] = weight;
added_weight = true;
break;
}
}
if (!added_weight) {
jntsAffected.push_back(jointIndex);
weights.push_back(weight);
}
[...]
[...]
if (weights.size() < max) {
while (jntsAffected.size() < max) {
jntsAffected.push_back(0);
weights.push_back(0.f);
}
}