So there's an interesting twist to the story of this algorithm: I'm not 100% sure why it works. It will probably make sense when I've actually had some time to look back over it, but the thing is, I stumbled upon the solution while writing messy code after about 5 drinks (I made a backup first, of course), and whatever makes this work, I don't think I would ever have tried it on purpose.
If you're not interested in the narrative, the short version is what I needed was very simple all along: just a slightly modified brushfire algorithm that only allows the node(s) with highest clearance to continue expanding its neighbors. Code and images are below.
So first, when I set out working yesterday morning, I refactored and wrote functions for generating and updating both static and dynamic 'clearance' and 'distance' maps, in my terminology, distance referring to the number of square rings around a position before hitting an obstacle or edge of world and clearance referring to the total clear area enclosed within the largest of those square rings. Clearance is a lot more helpful for the end purpose, distance is helpful for updating the clearance map locally rather than generating a whole new one, as suggested earlier in the thread. That code has done what it needs to from the beginning and stuck around through the rest of my experimenting.
When I set about reworking the algorithm itself, I first tried the approach that I previously said was most promising, simply adding in the precomputed maps to the existing algorithm, requesting a map adjusted for dynamic obstacles at the time the algorithm is run. It did produce correct results and did result in a speedup, but only a very small one, roughly 0.4 seconds, better than nothing but not overly helpful.
After this, I tried an approach that created contiguous 'rooms' with edges defined by changes in distance (yes, distance rather than clearance, as the numbers vary much less but are not specific enough to be as helpful as needed, it turns out). I don't think I've ever written more disgusting code, maybe apart from the one time I tried messing around with GL shaders. Suffice it to say, it did not work. Maybe it could have been made to work, but it revealed quickly that, where I had imagined rooms being messy, convex blobs, they more tended to be concave rings that clung to the walls and world edges. One particularly important problem that arises from this is, how would I define the approximate location of a room like this relative to the destination? I was calculating a rough center of mass for each room, but if the room is a thin ring around a wide area, that center of mass has little to do with where that room actually is. Maybe this approach could have been made to work another way, but looking over the data it produced led me to the approach that did end up working.
So as I already mentioned, despite my specific needs being a fairly unique case, a very simple solution that only needed a little tweaking has already existed for a long time, and that is the brushfire algorithm. In its basic form, all a brushfire algorithm does is expand nodes such that all paths considered are kept to the same length until one of them reaches the destination. It doesn't use any heuristic; it just accepts the first path that gets there, relying on the principle that the shortest path will get there first. I'm not an expert on it, but my understanding is that it only considers horizontal and vertical neighbors so that there isn't any consideration of diagonal movement cost, updating existing paths with shorter alternatives, etc. This is actually one of the earliest approaches I considered, long before I posted here, but I shied away from doing it the right way because I thought I would end up having to do weird things to incentivize it to consider diagonal paths correctly and instead put together what essentially amounted to a stupid version of A*. Should have trusted it. It finds diagonal paths just fine, the only thing being that it will produce a 'staircase' type of path, repeatedly moving horizontally and then vertically, since that's all it's allowed to do. The final path just needs some smoothing, and it's perfect.
Where my implementation differs is that, rather than keeping all path lengths consistent, it only allows the node with the highest clearance to expand. This still means a lot of nodes are considered, but there is essentially no calculation to be done on them apart from acknowledging that they exist and adding them to a few lists. Paths stop expanding at narrow passages and continue when no higher-clearance options are available. It's pretty simple, ultimately; I just wasn't thinking about it the right way from the start.
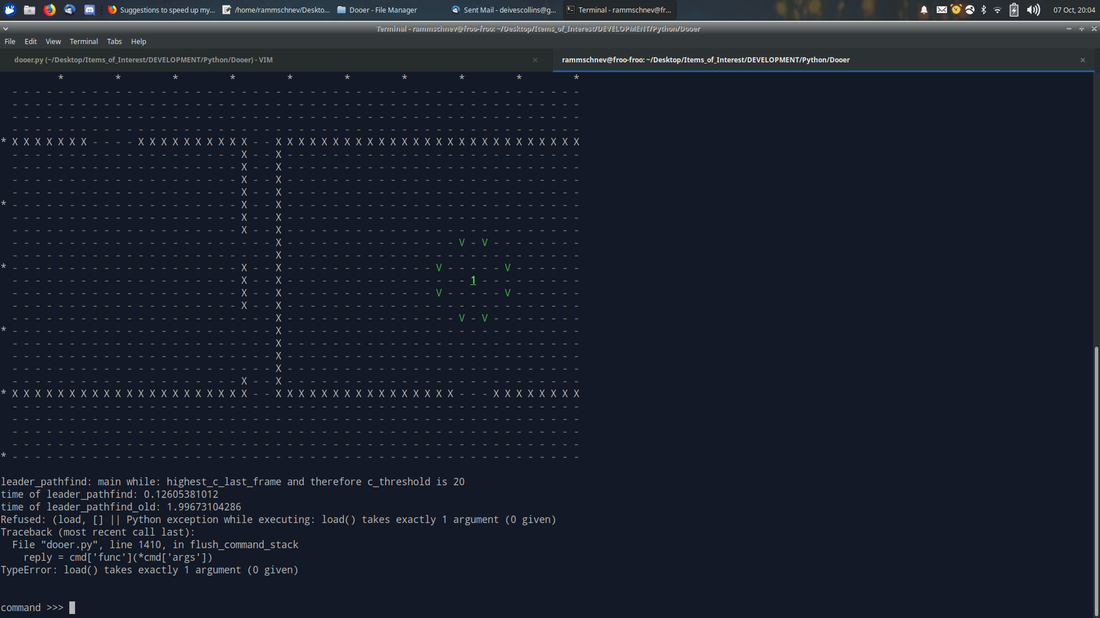
So now it's time for the actual results. On my worst-case-scenario map, shown below, I've gotten a speedup from 1.99 seconds with the A* approach down to 0.13 seconds with the brushfire approach, less than 10% of the original runtime. Perfect. This is now something I can confidently allow to run multiple times in a frame in the course of a complicated game with lots of player and AI formations running around.
Here is the code that finally freed me from this mental prison, although it will probably be ever so slightly tweaked when I understand the anomaly I will explain shortly:
static_clearance_map = [[0 for y in range(game_height)] for x in range(game_width)]
static_distance_map = [[0 for y in range(game_height)] for x in range(game_width)]
# Distance in this context refers to the number of square rings around the given position until an obstacle is hit
# We use this information to update only necessary parts of static_clearance_map when new static objects are spawned
def update_static_maps():
global static_clearance_map
global static_distance_map
write_log('updating static maps globally')
for x in range(game_width):
for y in range(game_height):
area, distance = clear_area_and_distance_static((x, y))
static_clearance_map[x][y] = area
static_distance_map[x][y] = distance
write_numeric_2D_list_to_file(static_clearance_map, 'static_clearance')
write_numeric_2D_list_to_file(static_distance_map, 'static_distance')
def update_static_maps_local_to(position):
global static_clearance_map
global static_distance_map
write_log('updating static maps locally')
positions_to_update = [position]
distance = 0
new_positions_found = True
while new_positions_found:
distance += 1
corner_a = (position[0] - distance, position[1] - distance)
corner_b = (position[0] + distance, position[1] + distance)
ring = rectline(corner_a, corner_b)
new_positions_found = False
for point in ring:
if not within_game_bounds(point):
continue
distance_at_point = static_distance_map[point[0]][point[1]]
x_diff = abs(position[0] - point[0])
y_diff = abs(position[1] - point[1])
if x_diff <= distance_at_point and y_diff <= distance_at_point:
positions_to_update.append(point)
new_positions_found = True
updated_positions = [[0 for y in range(len(static_clearance_map[0]))] for x in range(len(static_clearance_map))]
for pos in positions_to_update:
updated_positions[pos[0]][pos[1]] = 1
area, distance = clear_area_and_distance_static(pos)
static_clearance_map[pos[0]][pos[1]] = area
static_distance_map[pos[1]][pos[1]] = distance
write_numeric_2D_list_to_file(static_clearance_map, 'static_clearance')
write_numeric_2D_list_to_file(static_distance_map, 'static_distance')
write_numeric_2D_list_to_file(updated_positions, 'updated_positions')
def clear_area_and_distance_static(position):
""" Check in square rings around the position for static obstacles/edges of map, then return the total area that is passable
within the square that first hits an obstacle/edge of map and the size of that square """
if static_obstacle_at_position(position):
return (0, 0)
distance = 0
hit_obstacle = False
while not hit_obstacle:
distance += 1
corner_a = (position[0] - distance, position[1] - distance)
corner_b = (position[0] + distance, position[1] + distance)
ring = rectline(corner_a, corner_b)
for point in ring:
if not within_game_bounds(point):
hit_obstacle = True
break
elif static_obstacle_at_position(point):
hit_obstacle = True
break
tent_area = rectfill(corner_a, corner_b)
area = 0
for point in tent_area:
if within_game_bounds(point):
if not static_obstacle_at_position(point):
# Some stray diagonals may get counted here occasionally, but that should be acceptable for this purpose
area += 1
return (area, distance)
def get_dynamic_clearance_map(treat_passable = [], treat_impassable = []):
""" Return a modified version of static_clearance_map that accounts for objects that can move (units) """
global objects
global static_clearance_map
global static_distance_map
dynamic_clearance_map = [static_clearance_map[x][:] for x in range(len(static_clearance_map))]
dynamic_obstacles = []
for obj in objects:
if 'frames_to_move' in obj.keys():
dynamic_obstacles.append(obj)
positions_to_modify = treat_passable + treat_impassable
for obstacle in dynamic_obstacles:
position = obstacle['position']
if not position in positions_to_modify:
positions_to_modify.append(position)
distance = 0
new_positions_found = True
while new_positions_found:
distance += 1
corner_a = (position[0] - distance, position[1] - distance)
corner_b = (position[0] + distance, position[1] + distance)
ring = rectline(corner_a, corner_b)
new_positions_found = False
for point in ring:
if not within_game_bounds(point):
continue
distance_at_point = static_distance_map[point[0]][point[1]]
x_diff = abs(position[0] - point[0])
y_diff = abs(position[1] - point[1])
if x_diff <= distance_at_point and y_diff <= distance_at_point:
if not point in positions_to_modify:
positions_to_modify.append(point)
new_positions_found = True
for position in positions_to_modify:
area = clear_area_and_distance_dynamic(position, treat_passable = treat_passable, treat_impassable = treat_impassable)[0]
dynamic_clearance_map[position[0]][position[1]] = area
write_numeric_2D_list_to_file(dynamic_clearance_map, 'dynamic_clearance')
return dynamic_clearance_map
def get_dynamic_distance_map(treat_passable = [], treat_impassable = []):
""" Return a modified version of static_distance_map that accounts for objects that can move (units) """
global objects
global static_clearance_map
global static_distance_map
dynamic_distance_map = [static_distance_map[x][:] for x in range(len(static_distance_map))]
dynamic_obstacles = []
for obj in objects:
if 'frames_to_move' in obj.keys():
dynamic_obstacles.append(obj)
positions_to_modify = treat_passable + treat_impassable
for obstacle in dynamic_obstacles:
position = obstacle['position']
if not position in positions_to_modify:
positions_to_modify.append(position)
distance = 0
new_positions_found = True
while new_positions_found:
distance += 1
corner_a = (position[0] - distance, position[1] - distance)
corner_b = (position[0] + distance, position[1] + distance)
ring = rectline(corner_a, corner_b)
new_positions_found = False
for point in ring:
if not within_game_bounds(point):
continue
distance_at_point = static_distance_map[point[0]][point[1]]
x_diff = abs(position[0] - point[0])
y_diff = abs(position[1] - point[1])
if x_diff <= distance_at_point and y_diff <= distance_at_point:
if not point in positions_to_modify:
positions_to_modify.append(point)
new_positions_found = True
for position in positions_to_modify:
distance = clear_area_and_distance_dynamic(position, treat_passable = treat_passable, treat_impassable = treat_impassable)[1]
dynamic_distance_map[position[0]][position[1]] = distance
write_numeric_2D_list_to_file(dynamic_distance_map, 'dynamic_distance')
return dynamic_distance_map
def clear_area_and_distance_dynamic(position, treat_passable = [], treat_impassable = []):
""" Check in square rings around the position for all obstacles/edges of map, then return the total area that is passable
within the square that first hits an obstacle/edge of map and the size of that square """
if (not position_is_passable(position)) and (not position in treat_passable):
return (0, 0)
distance = 0
hit_obstacle = False
while not hit_obstacle:
distance += 1
corner_a = (position[0] - distance, position[1] - distance)
corner_b = (position[0] + distance, position[1] + distance)
ring = rectline(corner_a, corner_b)
for point in ring:
if not within_game_bounds(point):
hit_obstacle = True
break
elif (object_at(point) is not None) or (point in treat_impassable):
if not point in treat_passable:
hit_obstacle = True
break
tent_area = rectfill(corner_a, corner_b)
area = 0
for point in tent_area:
if within_game_bounds(point):
if (object_at(point) is None) or (point in treat_passable):
# Some stray diagonals may get counted here occasionally, but that should be acceptable for this purpose
if not point in treat_impassable:
area += 1
return (area, distance)
def leader_pathfind(leader, going_to, treat_passable = [], treat_impassable = []):
global formation_dict
at_now = leader['position']
if at_now == going_to:
return []
treat_passable.append(going_to) # Prevents indefinite hanging while rerouting if an obstacle has moved to the destination
formation_obj = formation_dict[leader['id']]
vectors = formation_obj.get_formation_vectors()
optimal_distance = 0
for vector in vectors:
for axis in vector:
if abs(axis) > optimal_distance:
optimal_distance = abs(axis)
dynamic_clearance_map = get_dynamic_clearance_map(treat_passable = treat_passable, treat_impassable = treat_impassable)
def c(position):
if within_game_bounds(position):
distance = dynamic_clearance_map[position[0]][position[1]]
return distance
else:
raise ValueError('leader_pathfind: c: position ' + str(position) + ' not in game bounds')
c_dict = {at_now: c(at_now)}
g_dict = {at_now: 0}
open_set_this_frame = [at_now]
open_set_next_frame = []
closed_set = []
get_last = {}
c_threshold = c_dict[at_now]
highest_c_last_frame = c_dict[at_now]
search_map = [[0 for y in range(game_height)] for x in range(game_width)] # This is just for visualizing the algorithm's behavior
found_path = False
while len(open_set_this_frame) > 0:
if highest_c_last_frame != c_threshold:
c_threshold = highest_c_last_frame
write_log('leader_pathfind: main while: highest_c_last_frame and therefore c_threshold is ' + str(c_threshold))
highest_c_last_frame = 0
current = open_set_this_frame[0]
for op in open_set_this_frame:
if op == going_to:
found_path = True
current = op
break
if c_dict[op] > c_dict[current]:
current = op
if current == going_to:
found_path = True
break
open_set_this_frame.remove(current)
if c_dict[current] > highest_c_last_frame:
highest_c_last_frame = c_dict[current]
if c_dict[current] > c_threshold:
open_set_next_frame.append(current)
write_log('leader_pathfind: --- --- delaying current ' + str(current) + ' with c = ' + str(c_dict[current]) + ' compared to c_threshold = ' + str(c_threshold))
pass #continue
write_log('leader_pathfind: --- --- accepting current ' + str(current) + 'with c = ' + str(c_dict[current]) + ' compared to c_threshold = ' + str(c_threshold))
closed_set.append(current)
search_map[current[0]][current[1]] = g_dict[current]
write_log('leader_pathfind: main while: considering ' + str(current))
for neighbor in neighbors_brushfire(current):
write_log('leader_pathfind: --- --- considering neighbor ' + str(neighbor) + ' of original ' + str(current))
if not within_game_bounds(neighbor):
continue
if neighbor in closed_set:
if neighbor == going_to:
write_log('leader_pathfind: destination ' + str(going_to) + ' has been found in closed_set')
continue
if neighbor in open_set_this_frame:
if neighbor == going_to:
write_log('leader_pathfind: destination ' + str(going_to) + ' has been found in open_set_this_frame')
continue
if neighbor in open_set_next_frame:
if neighbor == going_to:
write_log('leader_pathfind: destination ' + str(going_to) + ' has been found in open_set_next_frame')
continue
tent_c = c(neighbor)
if tent_c == 0:
continue
tent_g = g_dict[current] + 1
open_set_next_frame.append(neighbor)
c_dict[neighbor] = tent_c
g_dict[neighbor] = g_dict[current] + 1
get_last[neighbor] = current
if neighbor == going_to:
write_log('leader_pathfind: destination ' + str(going_to) + ' has been added to open_set_next_frame in the usual way')
open_set_this_frame, open_set_next_frame = open_set_next_frame, open_set_this_frame
write_numeric_2D_list_to_file(search_map, 'search_map')
if found_path:
path = [going_to]
current = path[-1]
while current != at_now:
current = get_last[current]
path.append(current)
path.reverse()
path.pop(0)
return path
else:
write_log('leader_pathfind: could not find path from ' + str(at_now) + ' to ' + str(going_to))
return False
(I've forgotten to mention, my code is in Python 2.7, not the most current version, which is not ideal and honestly wasn't on purpose.)
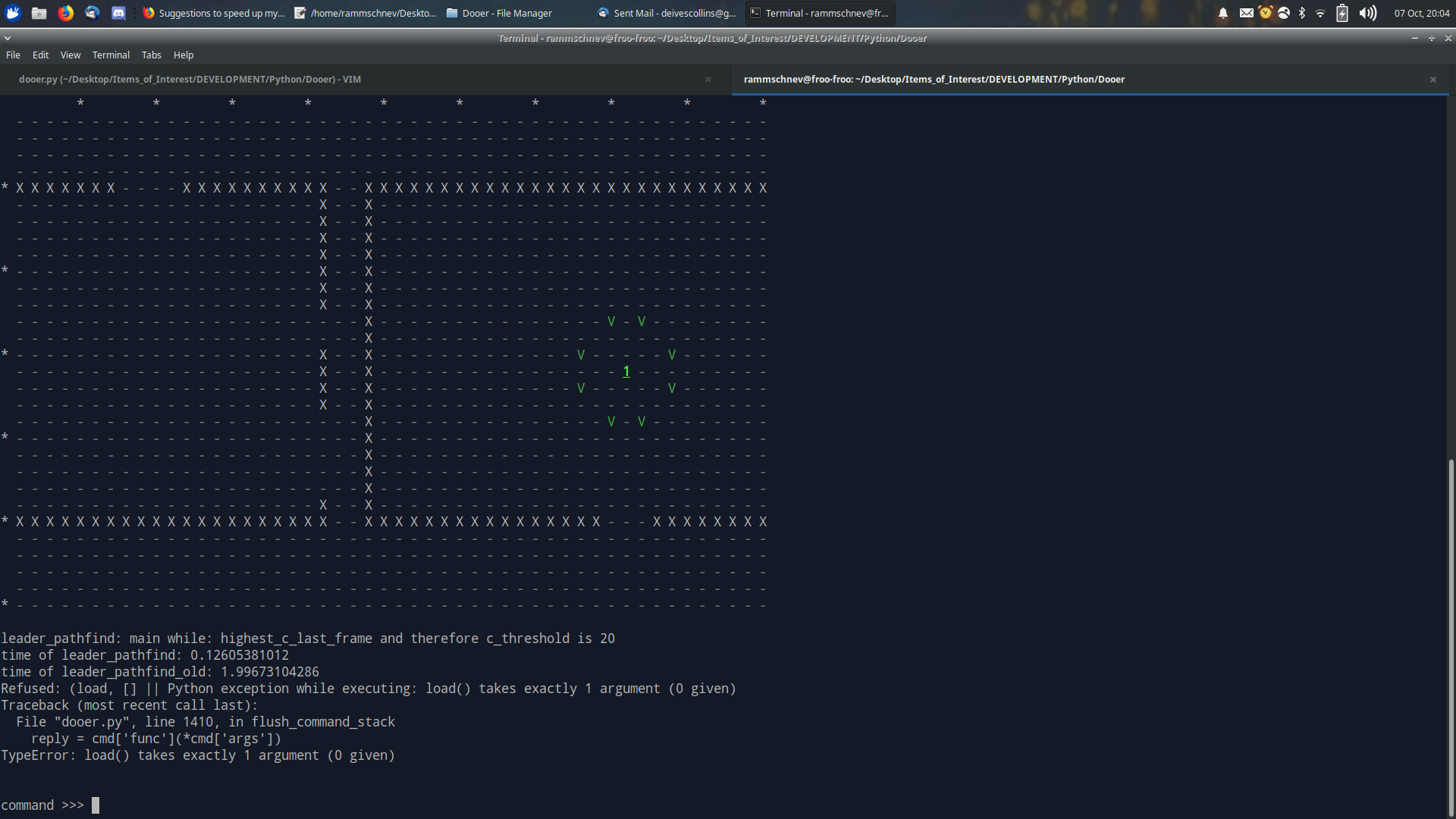
Here is my worst-case scenario map, which I call 'bottleneck:'
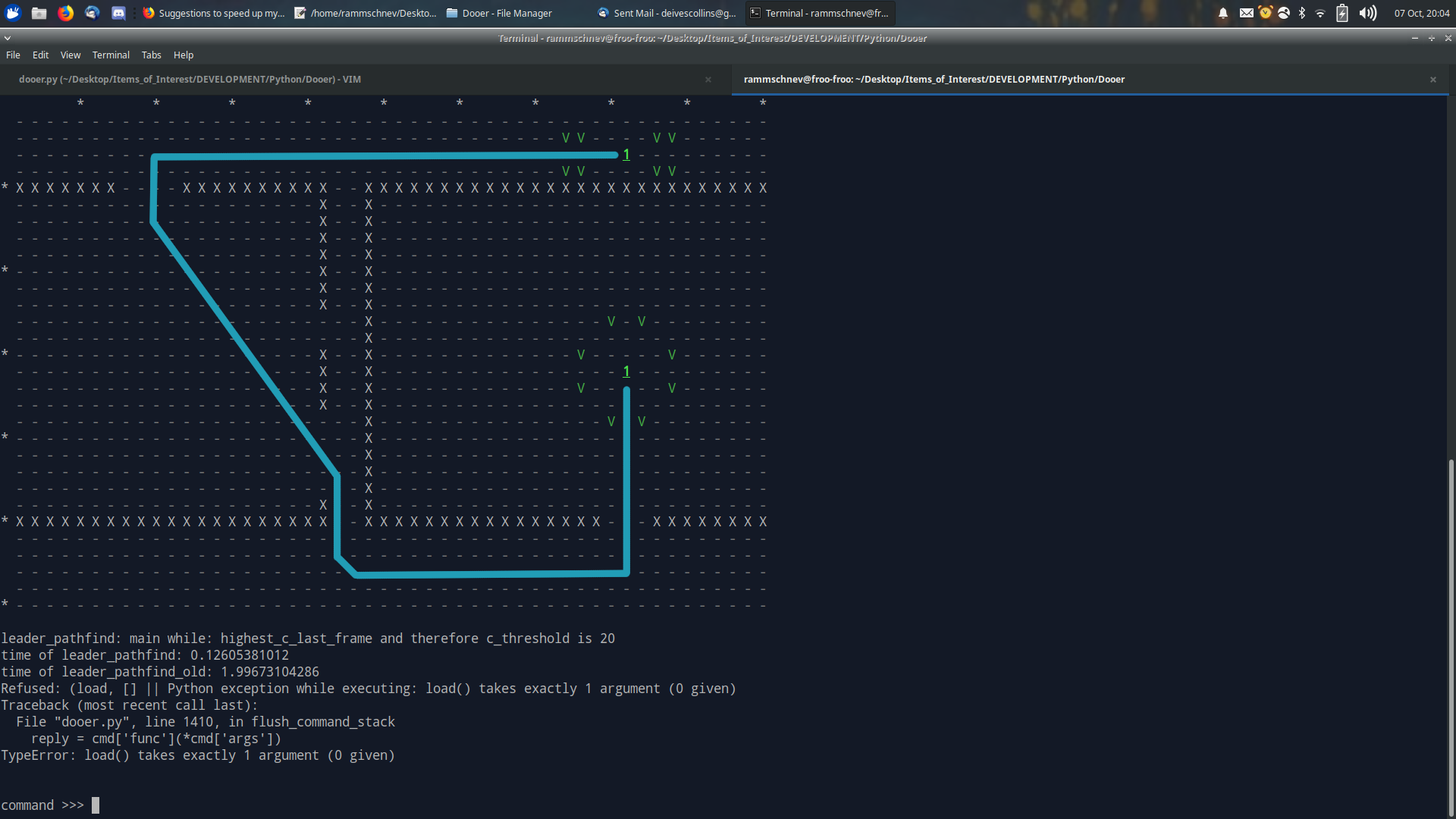
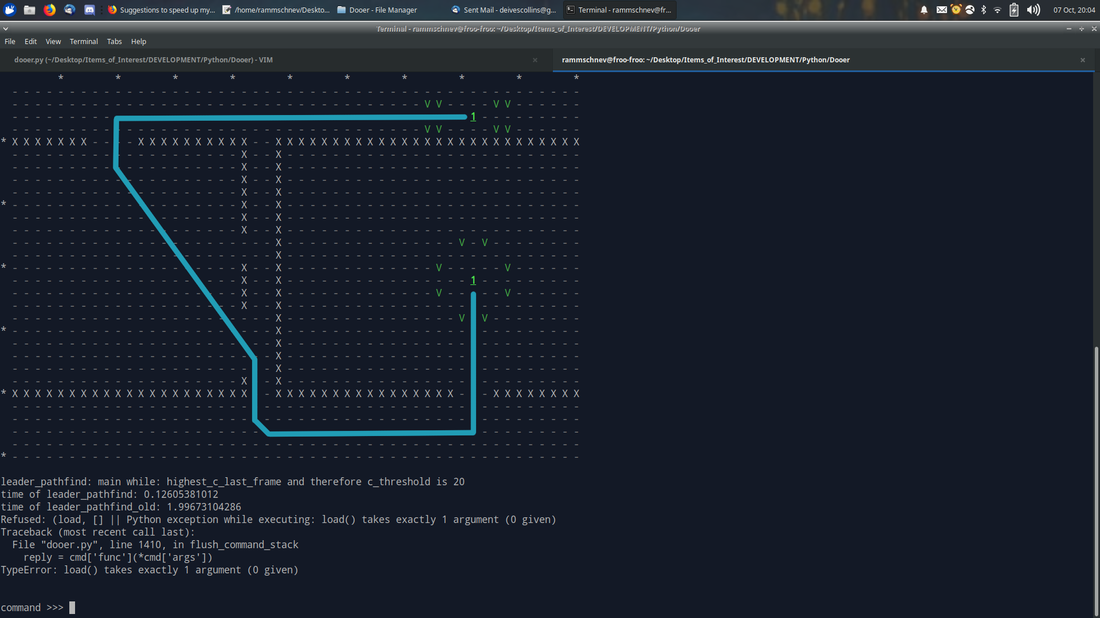
Here is the path we want returned by the algorithm (assuming diagonal smoothing has taken place):
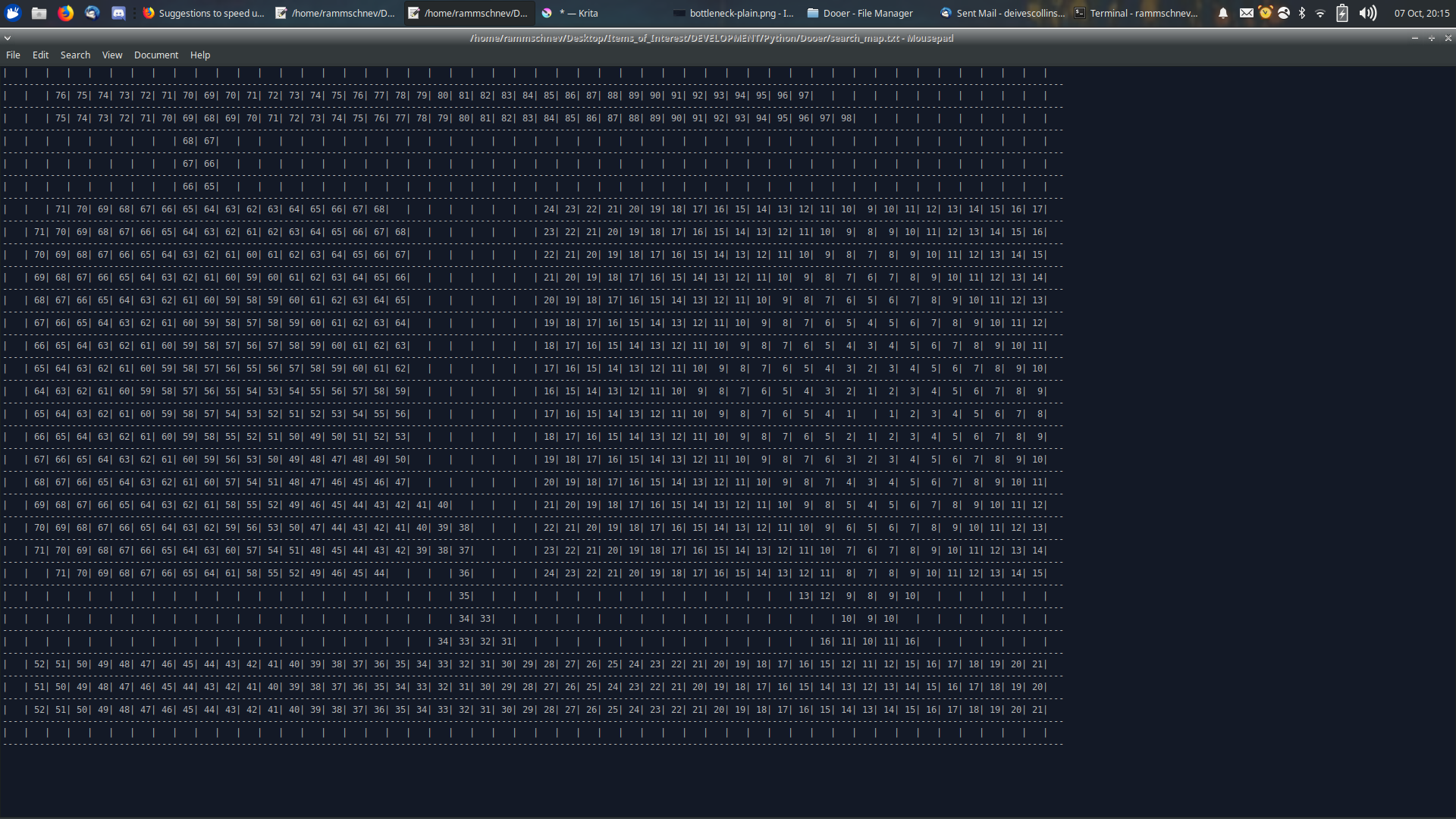
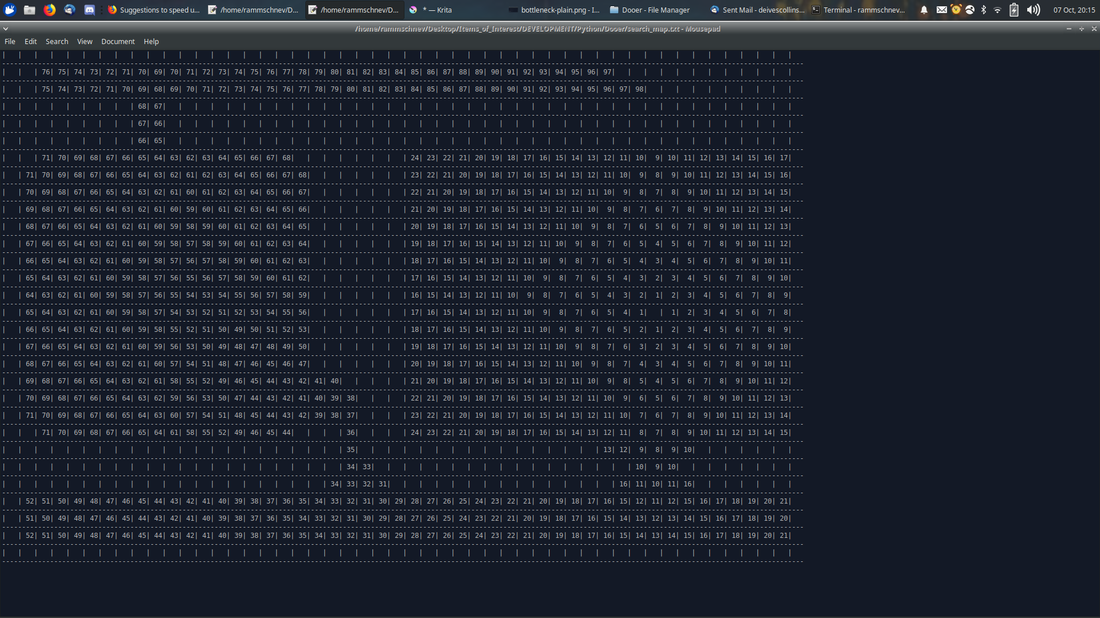
Here is a visualization of what the algorithm considers, where the value of a cell represents how many steps have been taken to find that cell. Only considered (expanded) nodes get a value, not neighbors awaiting consideration.
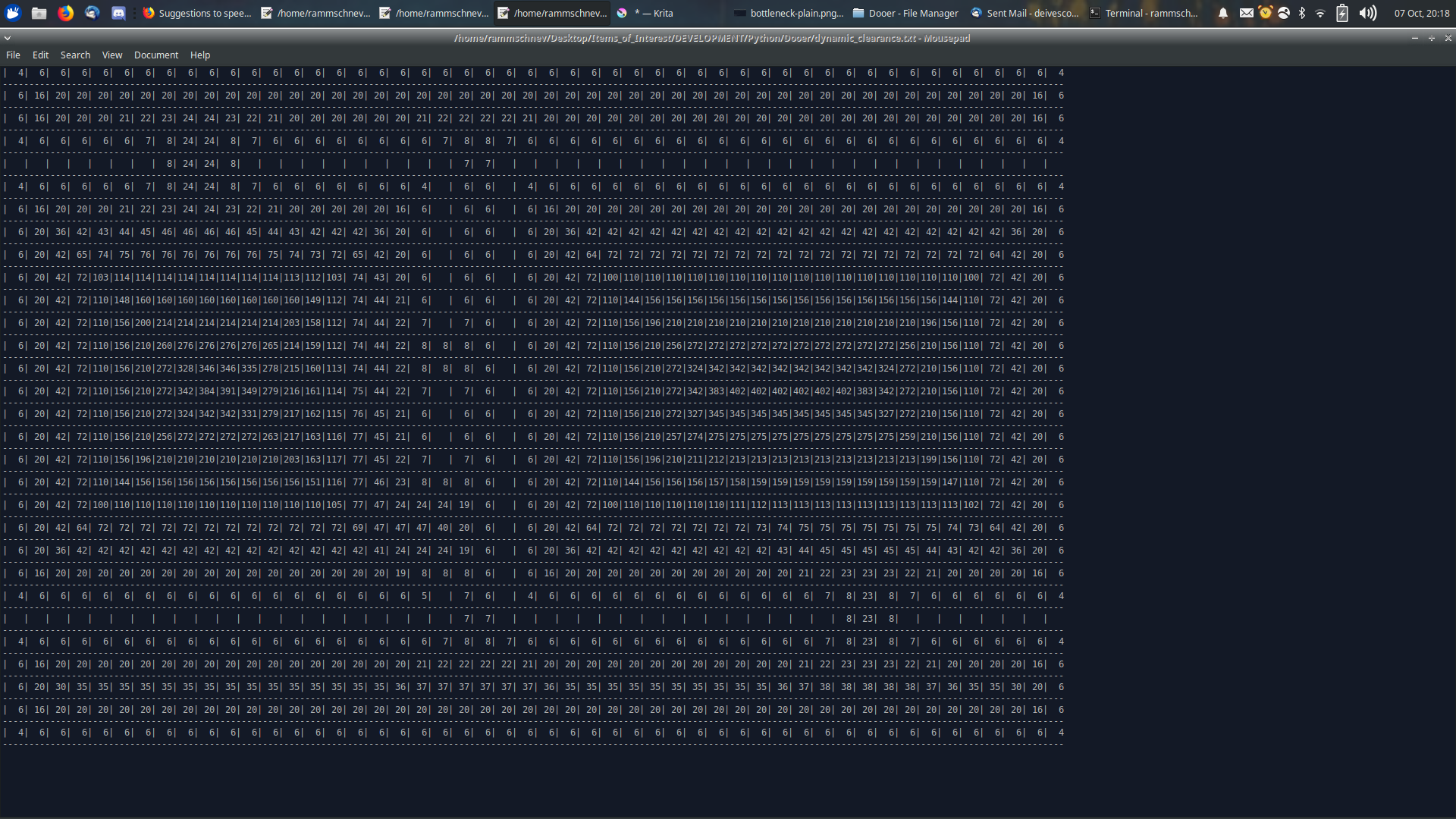
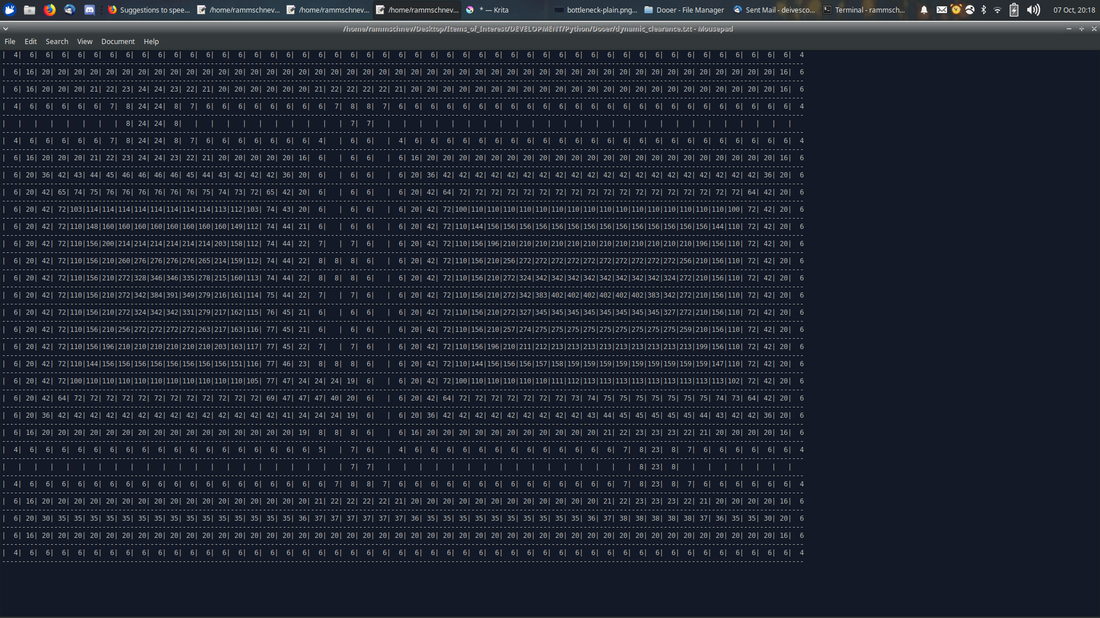
And this is the clearance map which the algorithm used to produce these results:
So there's what's important. It works and performs beautifully. I could leave this alone and move on, if I didn't consider it important to understand what serendipitously went right in my final algorithm. Read on if you want to know about that.
What the algorithm actually does is pretty close to what I meant for it to do when writing it. However, rather than considering the node with the very highest clearance every iteration, I meant to identify a batch of acceptable nodes above a certain clearance threshold (c_threshold), bump rejected nodes into a second set along with discovered neighbors that would move up to first priority next frame** (and continue to bump them for however long they remain below the changing threshold), and create a new empty list to replace the second set once it gave up its contents to the first list. Solely for the purpose of recycling memory, instead of actually creating a new lists, I intended to swap the values of the first and second lists once the first was empty. We see this happen at line 356 of the above code:
** It's misleading of me to use the term 'frame' here. I'm not talking about frames in the context of the execution of the game, but rather treating each batch of nodes as a 'frame'
open_set_this_frame, open_set_next_frame = open_set_next_frame, open_set_this_frame
If you're not familiar with Python, this operation swaps the value of two variables without the need to create a third temporary variable.
What I failed to do was have this happen only when the first list (open_set_this_frame) was empty. Instead, this happens every iteration. Meanwhile, I also accidentally bumped nodes with values above rather than below the c_threshold into the second list, which you can see at line 312:
if c_dict[current] > c_threshold:
open_set_next_frame.append(current)
write_log('leader_pathfind: --- --- delaying current ' + str(current) + ' with c = ' + str(c_dict[current]) + ' compared to c_threshold = ' + str(c_threshold))
pass #continue
Originally the block would continue (i.e. not proceed with considering this node) rather than simply pass (do nothing, effectively just an empty line). Interestingly, the algorithm works either way, although opting to continue rather than pass leaves a few puzzling holes in the search map that I'd rather not have become problems later. However, a consequence of this is that the node gets considered and therefore ends up in the closed_set while also existing in open_set_next_frame, potentially multiple times over. And somehow, this doesn't cause any problems.
So instead of dealing with a batch of nodes and choosing from it the node with the highest_c above the c_threshold, the algorithm chooses the node with the highest clearance each iteration and bounces between two fluctuating open sets full of duplicates. Before writing this, I spent a quick minute in a more sober state of mind tweaking the code to run the way I originally intended it to, and for reasons I've not yet taken the time to determine, the algorithm in fact fails altogether that way. It also fails if the greater than is changed to a less than in line 312. But by the mysterious hand of fate, as it stands now, it serves all my needs, and only my curiosity keeps me bound to ever looking at it again.
So with that, the case is almost entirely closed. I will post a small update when I figure out what sorcery is at play in those implementation details. If you actually read all of this, you're an athlete and deserve to know it. Big thanks again to everyone who contributed ideas that helped me get here, and hopefully this eventually helps another hobby dev or two down the line.