
Hi guys,
For the most part my navigation system is working, there are, however, some glitches. I'm not really sure what method I should use to have my agent go to his computed waypoints. Please keep in mind this is for an action game and I want the agent to recalculate his path every frame.
Take a look at this (mesh is pre-shrunken for agent radius) :
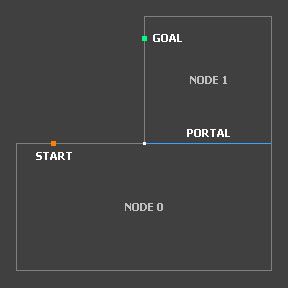
I have problems with this simplistic scenario. The white point (the left of the portal) is the waypoint computed to get him to the next node (node 1) where the goal is.
If I just move him to the waypoint and do a small distance check he'll arrive just to the left of it, then head to the goal which will put him out of the mesh (by cutting the corner.) If I have him simply head toward the waypoint until he's in node 1 it won't work if he's not heading up at all, he'll stay in node 0. I can make it so he has to pass the waypoint a little but if he's coming from a different direction he could pass it and end up off the mesh.
How do I determine when he should start heading directy toward the goal ?
How is the basic navmesh with computed waypoints generally handled ?
Thanks a lot.







