Hi ")
I have a 3d rigged model and I'm trying to move his legs. I'm using jpct-ae and bones, but I think that my problems are in my mathematical approach :/
The steps to follow to rotate a bone are the following ?
1- we have to move from global pose to local pose (multiplying for the inverse bind pose)
2- after that we can apply rotation (or traslation)
3- and after finally I have to move to global right (multiplying for the bind pose)
Or I haven't understood ?
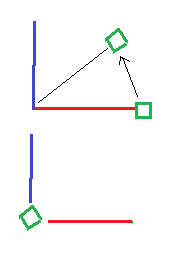
Because my results are wrong :




for completeness this is the code that I used
currentPose = modello.get(0).getSkeletonPose();
skeletonDebugger = new SkeletonDebugger(currentPose,10f, (short)0);
skeletonDebugger.addToWorld(world);
skeletonDebugger.setVisibility(showskeleton);
Legrotation();
MemoryHelper.compact();
protected void Legrotation()
{
Logger.log("Legrotation");
final Joint LUpperArm = currentPose.getSkeleton().findJointByName("Vincent L Thigh");
final Joint parentJoint = currentPose.getSkeleton().getJoint(LUpperArm.getParentIndex());
final Matrix global= new Matrix(LUpperArm.getBindPose());
float angle=(float)Math.toRadians(-90);
global.rotateZ(angle);
global.matMul(parentJoint.getInverseBindPose());
currentPose.getLocal(LUpperArm.getIndex()).setTo(global);
currentPose.updateTransforms();
skeletonDebugger.update(currentPose);
modello.applySkeletonPose();
modello.applyAnimation();
}Thanks a lot