

 [/td][td]
[/td][td]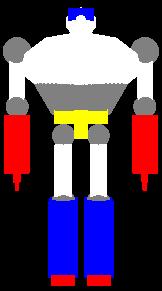 [/td][td]
[/td][td]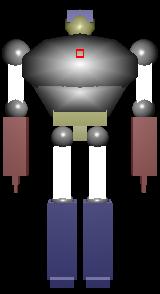 [/td][/tr][tr][td]Fig. 1a - Object Hierarchy[/td][td]1b - GL model[/td][td]1c - GL light model[/td][/tr][/table] Note the relationships between objects: Leg is pelvis child and pelvis is bust's child, forearm is arm's child and arm is shoulder's child, shoulder is bust's child too, and so on. So, if we move bust for example, legs and arms move too. This is an object hierarchy. Every piece of the robot is modeled into a function and stored in a display list so we'll have:
[/td][/tr][tr][td]Fig. 1a - Object Hierarchy[/td][td]1b - GL model[/td][td]1c - GL light model[/td][/tr][/table] Note the relationships between objects: Leg is pelvis child and pelvis is bust's child, forearm is arm's child and arm is shoulder's child, shoulder is bust's child too, and so on. So, if we move bust for example, legs and arms move too. This is an object hierarchy. Every piece of the robot is modeled into a function and stored in a display list so we'll have: void struct_part_name(void) { glNewList(part_name,GL_COMPILE); .../* GL Commands to model */ glEndList(); }void struct_left_arm(void) { glNewList(left_arm,GL_COMPILE); // Shoulder glTranslatef(1.1,0.25,0.0); glScalef(0.5,0.5,0.5); glColor3ub(128,128,128); glutSolidSphere(0.5,20,20); // Arm glTranslatef(0.0,-1.10,0.0); glScalef(0.5,1.5,0.5); glColor3ub(255,255,255); glutSolidCube(1.0); glEndList(); }... #include ... void DrawRobot() { glPushMatrix(); /* all objects are bust's son that is if we move bust all other parts move too */ /*-------------------- DRAW HEAD AND BUST -----------------------*/ glPushMatrix(); /* Draw head */ /* Draw bust */ glPopMatrix(); | [attachment=3301:head&bust.jpg] |
/*---------------- DRAW RIGHT ARM AND FOREARM --------------*/ glPushMatrix(); glPushMatrix(); /* Draw Right arm */ glPopMatrix(); glPushMatrix(); /* forearm is arm's child */ /* Draw Forearm */ glPopMatrix(); glPopMatrix(); | [attachment=3302:arm&forearm.jpg] |
/*-------------- DRAW LEFT ARM AND FOREARM -----------------*/ glPushMatrix(); glPushMatrix(); /* Draw Left arm */ glPopMatrix(); glPushMatrix(); /* forearm is arm's child */ /* Draw Forearm */ glPopMatrix(); glPopMatrix(); | [attachment=3303:arm&forearml.jpg] |
/*------------------ DRAW PELVIS AND LEGS ----------------*/ glPushMatrix(); /* another glPushMatrix because if we move pelvis the legs move too... (legs are pelvis' son) */ glPushMatrix(); /* Draw pelvis */ glPopMatrix(); glPushMatrix(); glPushMatrix(); /* Draw Right thigh */ glPopMatrix(); glPushMatrix(); /* leg is thigh's child */ /* Draw Leg */ glPopMatrix(); glPopMatrix(); glPushMatrix(); glPushMatrix(); /* Draw Left thigh */ glPopMatrix(); glPushMatrix(); /* leg is thigh's child */ /* Draw Leg */ glPopMatrix(); glPopMatrix(); glPopMatrix(); glPopMatrix(); } | [attachment=3304:pelvis&legs.jpg] |
void DrawRobot(void) { /*-------------BUST AND HEAD--------------*/ glPushMatrix(); glRotatef(bust_angle_y,0,1,0); glRotatef(bust_angle_x,1,0,0); glPushMatrix(); glCallList(bust); glCallList(head); glPopMatrix(); /*--------RIGHT ARM AND FOREARM---------*/ glPushMatrix(); glTranslatef(0,0.25,0); glRotatef(right_arm_angle,1,0,0); glTranslatef(0,-0.25,0); glPushMatrix(); glCallList(right_arm); glPopMatrix(); glPushMatrix(); glTranslatef(1.25,-0.7,0); glRotatef(right_forearm_angle,1,0,0); glTranslatef(-1.25,0.7,0); glCallList(right_forearm); glPopMatrix(); glPopMatrix(); /*---------LEFT ARM AND FOREARM---------*/ glPushMatrix(); glTranslatef(0,0.25,0); glRotatef(left_arm_angle,1,0,0); glTranslatef(0,-0.25,0); glPushMatrix(); glCallList(left_arm); glPopMatrix(); glPushMatrix(); glTranslatef(1.25,-0.7,0); glRotatef(left_forearm_angle,1,0,0); glTranslatef(-1.25,0.7,0); glCallList(left_forearm); glPopMatrix(); glPopMatrix();| '1' & 'Q' '2' & 'W' '3' & 'E' '4' & 'R' '5' & 'T' '6' & 'Y' '7' & 'U' '8' & 'I' KEY ARROWS PGUP & PGDOWN 'V' 'B' 'N' 'M' | right arm control right forearm control left arm control left forearm control left thigh control left leg control right thigh control right thigh control rotate model light control camera control |




This program can not run on my computer, please help on this error problem