
17 users logged in
Proud partner of GDC 2025

Before posting, review our community guidelines.
Support GameDev.net with a monthly GDNet+ subscription!
Latest reverseengineering Activity

September 06, 2020 09:20 AM
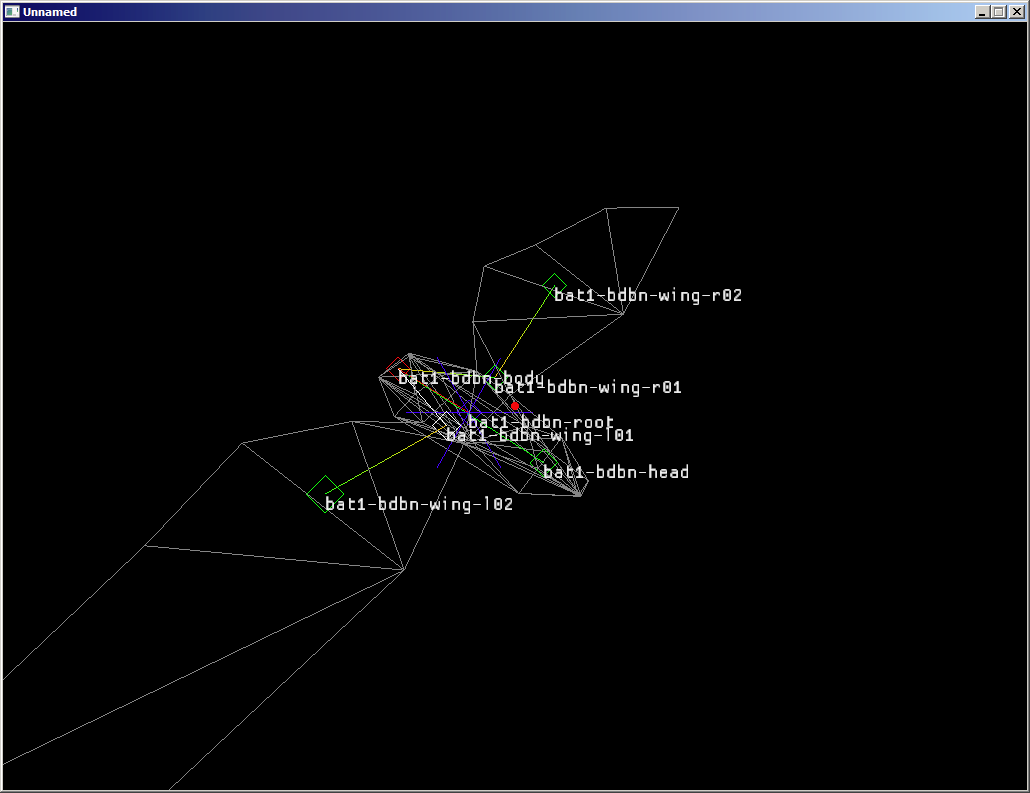
I applied my lackluster reverse-engineering skills and found out that quaternions in rotation keyframes are stored as four signed 16-bit numbers. They are converted to floating-point quaternions by multiplying each component by 0.000061038882f (== 1.0f / 16383.0f).
Now I have to figure out how this …
Advertisement
Advertisement
Advertisement