I'm trying to implement animation by deformation along a path in Miku Miku Dance. This problem is interesting to me, it opens up new options to animators, and it seems like a good way for me to learn more about transformations. I'm doing my deformation in a HLSL vertex shader, using bones as path nodes, using quaternions to create matrices to rotate my vertices, traveling down the path and rotating as I go. I don't understand quaternion math, but I found this code online, and it's worked for me other places ![]()
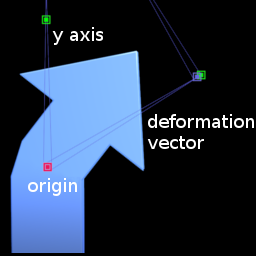
It's almost right. I really think I'm doing the right thing. Almost. But my angles aren't right. Demonstrated in the picture (yes, I'm using an actual arrow model to test).
At 90 degree intervals, the angles are correct. As I go from no transformation to 90 degrees, the transformation lags the vector. From 90 degrees to 180 degrees, the transformation overtakes the vector. This is symmetrical; transformation lags the -45 degree vector same as +45 degrees.
Here is the code I've written. I'm trying to include only relevant bits. I can include everything if anybody wants, just trying to spare you. This is for shader model 3.0/DX9.
...
float4 pos0 : CONTROLOBJECT < string name = PATHMODEL; string item = "0"; >;
//leave at origin, indicates beginning of deformation
float4 pos1 : CONTROLOBJECT < string name = PATHMODEL; string item = "1"; >;
//first node, proceeding from origin
...
float3 rotateAxis(float3 pos, float3 origin, float3 axis, float angle) {
//rotates pos around origin in axis by angle in rads using quaternion
pos -= origin;
float4 q;
q.xyz = axis*sin(angle/2.0f);
q.w = cos(angle/2.0f);
q = normalize(q);
float3 temp = cross(q.xyz, pos) + q.w * pos;
pos = (cross(temp, -q.xyz)+dot(q.xyz,pos)*q.xyz+q.w*temp);
pos += origin;
return pos;
}
...
VS_OUTPUT Basic_VS...
float4 wPos = mul( Pos, WorldMatrix );
float3 vec0 = YVEC;
//primary axis, as vertices travel in positive Y axis they are deformed
float3 vec1 = normalize(pos1.xyz - pos0.xyz);
float extent = wPos.y; extent -= pos0.y;
if (extent > 0.0f) {
float3 axis = cross(vec0, vec1);
float angle = (PI*(1.0f-((dot(vec0,vec1)) + 1.0f)/2.0f));
wPos.xyz = rotateAxis(wPos.xyz, pos0.xyz, axis, angle);
}
Out.Pos = mul( wPos, ViewProjMatrix );
...Am I misunderstanding the dot product here? Does my function not do what I think it does? Something else? Any help is greatly appreciated. I'm an amateur, I try to read and learn, but no formal education, no experience, and no people around me studying the same things, and I'm really grateful for the people on this forum that provide help.