[font="Arial"]Are they telling me to compare the new adjacent Node's [/font][font="Arial"](that is already on my openList)[/font][font="Arial"] G value with my current Node's?
[/font]
Of course not. That would be meaningless and redundant with what they are saying.
You're supposed to check if that node is ALREADY in the open list and if your new path to get there is SHORTER than the one you found previously. That means your current nodes G PLUS the cost to actually get to the other node.
You might be able to skip that part if you are sure your heuristic will never overestimate the actual cost to the goal (and if searching/modifying the open list is more expensive than just pointlessly adding and processing the node twice with different Gs).
Edit: uhm... that link you posted even explicitely explains that:
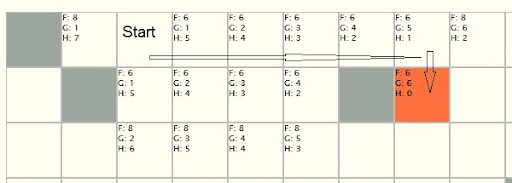
"[font="Arial"]The other four squares are already on the open list, so we need to check if the paths to those squares are any better using this square to get there, using G scores as our point of reference. Let’s look at the square right above our selected square. Its current G score is 14. If we instead went through the current square to get there, the G score would be equal to 20 (10, which is the G score to get to the current square, plus 10 more to go vertically to the one just above it). A G score of 20 is higher than 14, so this is not a better path. That should make sense if you look at the diagram. It’s more direct to get to that square from the starting square by simply moving one square diagonally to get there, rather than moving horizontally one square, and then vertically one square. "
[/font]